�C�����������ݵ��о��F������ô�ӵ�
2023/11/28 12:07:12�c����
�C�����������ݵ��о��F������ô�ӵ�
�C�����ѽ��ɞ�F�������в��ɻ�ȱ��һ���֡����˹��I������I���C�����ѽ��_ʼ�M���ͥ���t���������I���S���˹����ܵIJ���lչ���C���˵����ܺ�������Ҳ�õ������������C���˳��ݼ��g�İlչҲ�ɞ����о����c֮һ�����Č���ԓ�I����о��F���M�н�B����ՄՓδ���İlչڅ�ݡ�
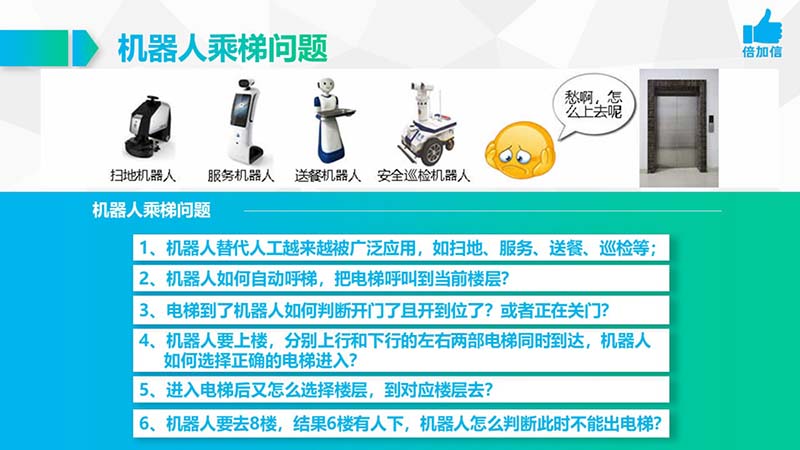
Ŀǰ���C���˳��ݼ��g�ѽ��õ����^��V���đ��ã���C�������Fվ���tԺ���I���ǣ��C���˳�����Ȼ��һ��������Ե��΄ա��C������Ҫ�������N���������㷨����֪���\�ӣ��Դ_���䰲ȫ���ژ��ݺ���������ߡ�

��Σ������㷨���C���ˌ���ݺ͘����M�и�֪��Ŀǰ���ܶ��о���ʹ������ȌW������ߙC���˸�֪�Ĝʴ_�ԡ�ͨ�^�@�N�㷨���C�����܉��Ԅ��R�e�����ڡ����ݵ�����������ϵK��Ķ��������{���Լ����Єӡ�
ͨ�^�@Щ���g���C���˿��Ԍ��F�ڏ��s�h������������ȫ�س�����ݺ����ߘ��ݡ����^���ڌ��H�����У�߀��Ҫ�M�д����yԇ����C���Դ_���䷀���ԺͿɿ��ԡ�
���ˬF�еęC���˳����о���δ���İlչ����Ҳֵ��̽ӑ���S���C���˼��g�IJ���lչ���C����Ҳ����u�߂����������Д�̈́���������δ���ęC���˳��ݼ��g����ͨ�^�˹������㷨���ڸ���Ĉ����������������Ƶ��΄ա�

��֮���C���˳��ݼ��g��Ŀǰ�C���˼��g��һ���������Ե��I����߀�кܶ�ĝ�����Ҫ�ھ�Ͱl��δ�����S���C���˼��g�İlչ��ԓ�I����о�Ҳ�����õ�������Pע��Ͷ�롣
���Ę˺����C�����������ݵ��о��F������ô�ӵ�
<
- ��һƪ���C�����������ݵ�������x���ģ� 2023/11/28
- ��һƪ���C���˳�������Щ���È����� 2023/11/28

 �����W���� 44030602004070̖
�����W���� 44030602004070̖